아..
시뮬레이터 하나 만들고 있는 것 때문에
아주 돌아가실 지경입니다.
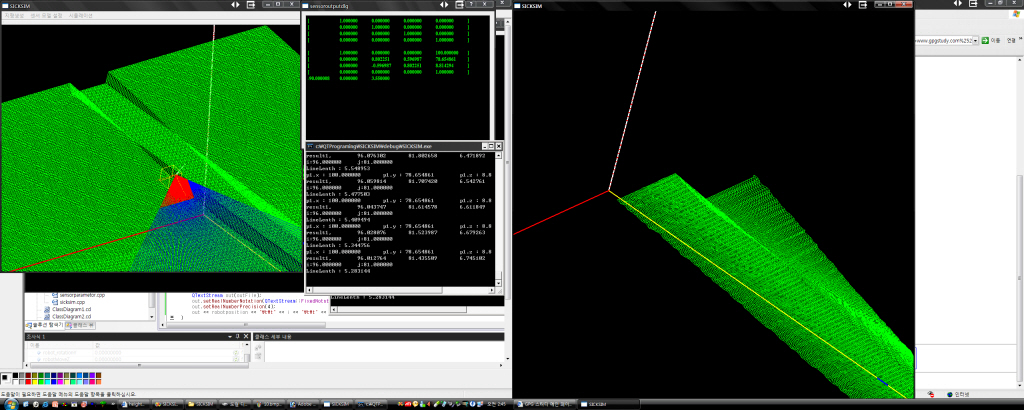
보통 자율주행 차량등에 쓰이는 방사형 레이저 거리측정센서를
모바일 로봇에 지면을 비스듬히 측정하도록 달아서
실시간 지형 측정 하는 것의 시뮬레이터인데..
3차원 기하 계산을 해야되는거라
도저히 그림으로 끄적여서는 누구한테도 설명할 수 없을거 같아서
시뮬레이터를 만들어서 돌아가는걸 보여주면 누구나 납득하겠지..
라는 속편한 생각으로 만들기 시작했는데
정말 더럽네요-_-.. 3D 프로그래밍..
OpenGL로 작업하는데
하이트맵 띄우고 모바일 로봇 생성해서 지형 주행하게 시킨다음
레이저 센서 레이 표시하고.. 센서 레이와 지형과의 교차점 구하고..
구한 교차점으로 센서 데이터 값 획득하고 수식에 넣어 역산해서
결과값 따로 플랏하고..
좋아 어디 결과를 확인해볼까.
좆 to the 망
기울기 보정공식은 제대로 작동하는것 같은데..
결과 값이 더럽네요. 어떻게 검증을 해야할지.. 끄응
내일이면 교수가 절 갈아마시려고 할텐데..
세미나만 안해도 작업능률이 두세배로 올랐을텐데.
아니 매주 하는 정기보고만 없어도 코드가 서너배는 안정적이고 깔끔했을텐데..
아무튼 밤샘입니다.
전공은 영상처린데..
실제로 하는짓은 왠 센서에 로봇에 3d 프로그래밍이니...
석사 2년찬데 카메라 못만져본지도 2년차..앜..
교수는 프로그램이 자고 일어나면 뚝딱 나오는 줄 알고
디버깅은 그냥 코드 쓱 훝어보면 되는 줄 알고
그냥 하소연 한번 해봅니다..ㅠ_ㅠ